SISTEMA DE DIRECÇÃO DO SUBA
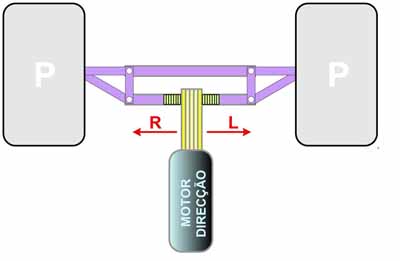
O SUBA tem um sistema de direcção baseado num trapézio de barras de direcção accionado pelo motor de direcção, fazendo as rodas virarem para a esquerda L ou direita R.
Fig.1 - Sistema básico de direcção do SUBA.
Há dois sistemas de direcção do SUBA: 1ª geração (motorizado sem controlo de posição ) e 2ª geração (motorizado e com controlo de posição).
PRIMEIRA GERAÇÃO DO SISTEMA DE DIRECÇÃO DO SUBA
Como este sistema não tem retroacção, a direcção das rodas é controlada num modo "tudo ou nada" ( vira completamente para esquerda ou para a direita), o controlo de direcção do carro é feito por sucessivos movimentos bruscos da direcção das rodas. Estes movimentos são controlados por dois sinais digitais Right e Left que são aplicados ao conector MotorIn/Clkout/Int existente na placa de interface do SUBA.
Este sistema não conduz a um controlo muito perfeito da direcção do movimento do carro, que lhe permita , por exemplo seguir com precisão uma linha traçada no chão.

Fig.2 - Fotografia do sistema básico de direcção do SUBA.
SEGUNDA GERAÇÃO DO SISTEMA DE DIRECÇÃO DO SUBA
Neste caso a direcção das rodas é controlada num modo progressivo sendo proporcional a uma variável de entrada usada para comandar a direcção. O sistema é baseado num servomecanismo Futaba 3003 dotado de retroacção. Este mecanismo permite manter a posição da direcção apesar desta, com o carro em andamento, estar submetida a forças mecânicas que contrariam a viragem das rodas.
O servomecanismo 3003 é actuado pela unidade de controlo electrónico ECU da direcção . A ECU da direcção é baseada num microcontrolador PIC 16F819 ou 16F628A.
As funções das ECU da direcção são:
1- Permitir fazer o alinhamento mecânico da direcção do SUBA e guardar digitalmente a informação de alinhamento numa memória EEPROM do microcontrolador.
2- Manter compatibilidade com o sistema de 1ª geração isto é ter comandos digitais de direcção: Left e Right.
Principio de funcionamento da direcção servo assistida do SUBA
1- Alinhamento da direcção
Sem ter quaisquer sinais de entrada aplicados pode acertar a direcção do SUBA premindo alternadamente os interruptores de botão colocados no pára-choques da frente. O LED do pára-choques correspondente acenderá.
O Botão da esquerda premido faz a direcção virar para a esquerda e o botão da direita vira a direcção para a direita.
Faça o carro andar para a frente ou para trás (mesmo à mão) e verifique e corrija o alinhamento.
A informação do erro mecânico da direcção fica automaticamente gravada numa memória não volátil do microprocessador da ECU.
2- Entradas digitais para controlo directo da direcção
Estas entradas permitem obter uma compatibilidade com o sistema antigo de direcção do SUBA.
Selecciona-se a direcção ESQ ou DIR e aplica-se uma palavra digital de entrada w={A, B, C, B}. A direcção vira para a esquerda ou para direita proporcionalmente ao valor equivalente da palavra w.
O Servo S3003 vira 60º para a esquerda e 60º para a direita, relativamente à posição central (veja características.
A posição central é obtida pela aplicação de um impulso eléctrico com a duração de 1,52 ms e a amplitude de 5 V.Com um impulso de 1 ms de duração o servo vira o eixo totalmente para a esquerda. Com 2 ms de duração de impulso o servo vira totalmente para a direita.
Assim a palavra digital w={A, B, C, D} com todos os bit a "1" origina um desvio de 60º , no veio do servo, e o desvio provocado pelo bit menos significativo, D, é de 4º.
A ECU introduz uma correcção na duração do impulso de modo a que com a palavra digital w={0, 0, 0, 0} o SUBA ande a direito.
3- Entrada digital directa para controlo da direcção através de largura de impulso
Esta entrada permite obter o controlo da direcção do SUBA com apenas suma linha de controlo.
Na Fig. 4 pode ver-se o esquema eléctrico da ECU da direcção. No conector IDC_10 pinos tem-se acesso aos sinais principais da ECU, ver T
| ECU de direcção - CONECTOR F3 |
| 1- b1 - entrada para ligar interruptor de botão normalmente desligado e que quando pressionado liga esta entrada à massa |
| 2- pulse_out -saída lógica para actuar servomecanismo com impulso com duração controlada (cerca de 50 Hz de taxa de repetição) |
| 3- b2 - entrada para ligar interruptor de botão normalmente desligado e que quando pressionado liga esta entrada à massa |
| 4- pulse_in -entrada lógica para actuar servomecanismo. Este impulso é reproduzido e corrigido para pulse_out. |
| 5- Dir - Direita (Right) entrada digital que diz para que direcção vai virar o servo. |
| 6- Esq - Esquerda (Leftt) entrada digital que diz para que direcção vai virar o servo. |
| 7- C - Entrada de Bit C da palavra digital de controlo da direcção |
| 8- D - Entrada de Bit D da palavra digital de controlo da direcção |
| 9- B - Entrada de Bit B da palavra digital de controlo da direcção |
| 10- A - Entrada de Bit A da palavra digital de controlo da direcção |
Tab. 1 - Sinais da ECU de direcção do SUBA com servomecanismo.

Fig.3 - Fotografia do sistema de direcção do SUBA com servomecanismo.
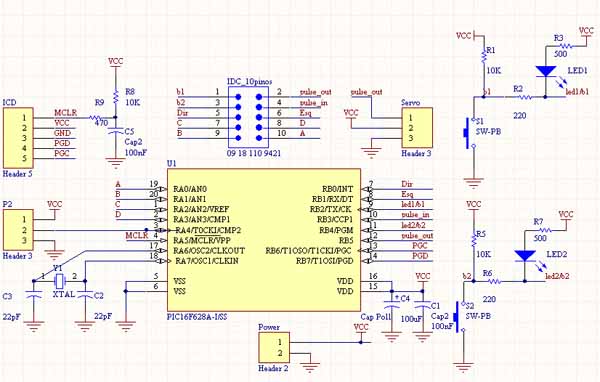
Fig.4 - Esquema da ECU da direcção do SUBA.
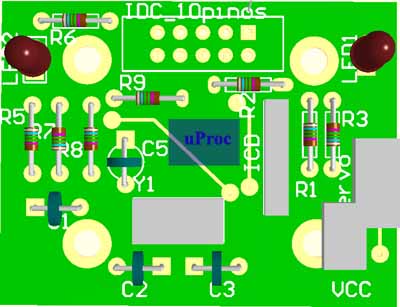
Fig.5 - Planta da ECU de direcção do SUBA.
(parte de cima - o LED1 e o LED2 podem estar colocados no pára-choques da frente).
SENSORES DE DIRECÇÃO DO SUBA
O sensor de direcção do SUBA é baseado num sensor diferencial com dois fototransístores que recebe a reflexão de luz infravermelha emitidos por 2 LEDs. O sensor diferencial é constituído por dois acopladores ópticos, Opto1 e Opto2 que são baseados na reflexão, por um objecto, da luz emitida pelo LED, para detectar no fototransístor a presença desse objectos.
Existe ainda o acoplador óptico Opto3 cujo centro está colocado a 28 mm do centro do sensor de direcção. Este sensor pode ser usado para detectar riscas ou marcas transversais existentes no piso e que podem conter um código de localização do carro (código de barras, por exemplo).
O sensor de direcção e o sensor de código de barras estão montados numa placa de e numa calha de alumínio, ver Fig. colocada á frente do eixo
O sensor de direcção está ligado pelo cabo plano ficha de ligação F1 que contem os sinais

Fig.6 - Sensores de direcção e de barras do SUBA.
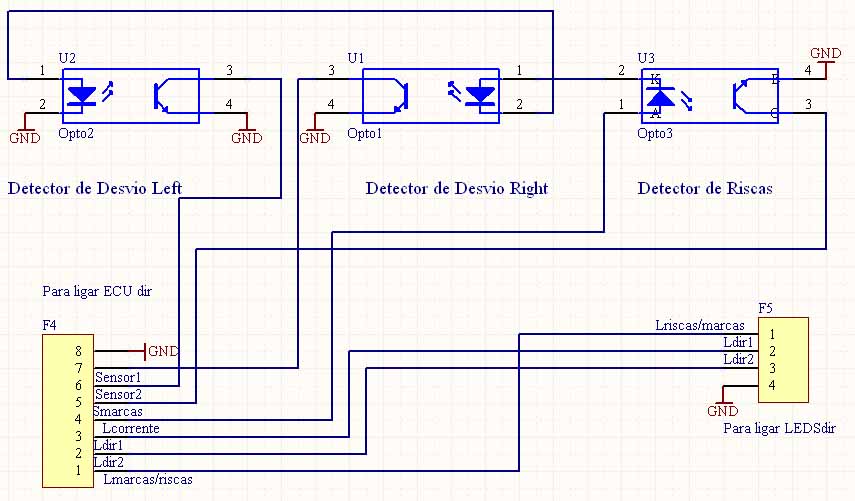
Fig.6 - Esquema eléctrico dos sensores de direcção do SUBA.
Uma faixa reflectora de luz existente num piso pouco reflector pode ser seguida pelo SUBA

Fig.7 - Planta da placa dos sensores de direcção do SUBA.